Home
Quadcopter Flight Controller
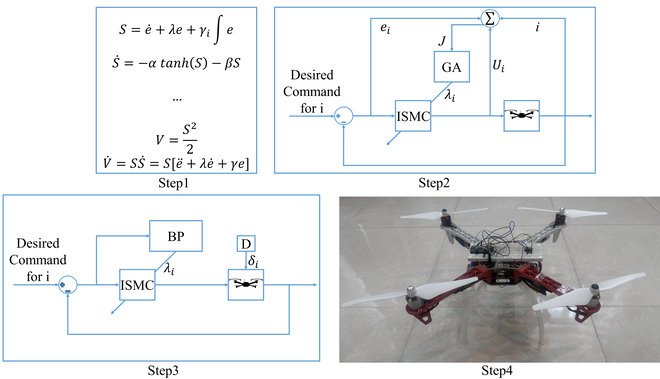
A cutting-edge flight controller has been meticulously designed and constructed, featuring an innovative control algorithm. The outcomes of this groundbreaking project have been undergoing review as an manuscript to IEEE Transactions on Aerospace and Electronic Systems (IEEE TAES). The article delves into the developmental and testing phases of an Integral Sliding Mode Control system specifically crafted for a quadcopter UAV. This system harnesses the power of Artificial Intelligence and Genetic Algorithms to achieve adaptive and optimal control signals based on real-time errors, thereby enhancing tracking performance and overall stability.
The integration of these advanced technologies results in a robust adaptive integral sliding mode controller capable of effectively rejecting uncertainties and external disturbances. Both simulation and construction results highlight the algorithm’s remarkable agility and adaptability, positioning it as a viable solution for both industrial and everyday applications.