Home
A Moving Robot for DRNN based BCI
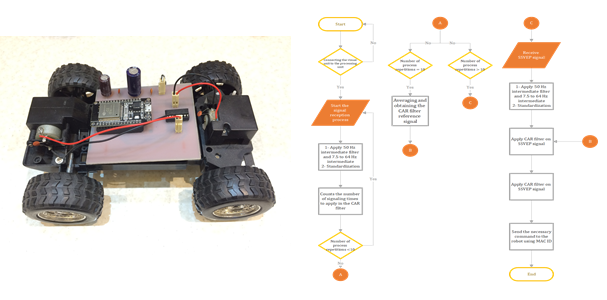
During the development of my master’s thesis, I designed and successfully implemented a deep neural network as outlined in the proposal. To validate its practical efficacy, it became imperative to conduct real-world testing. To facilitate this, a mobile robot equipped with the capability to connect to a computer, running specialized software tailored for this thesis, was essential. The software was created especially for my thesis.
The steering mechanism of this four-wheeled robot was orchestrated through an ESP-32 core, establishing a seamless connection with a laptop via a Wi-Fi network. The culmination of this study brings me a sense of pride, and the comprehensive content of the thesis is currently undergoing review in the Biomedical Signal Processing and Control journal.